

-
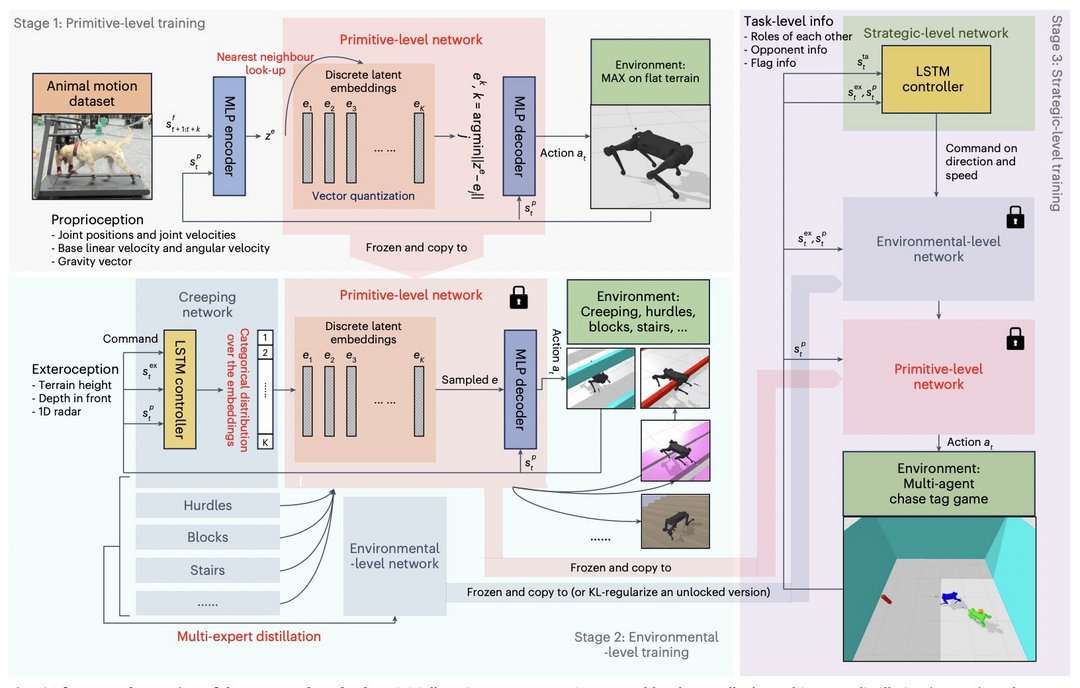
腾讯机器人实验室开发出新框架 使四足机器人能够像动物一样敏捷地移动
时间:2024-07-16来源:电动新能源车网作者:热度:
盖世汽车讯 四足动物天生就具有敏捷和适应性强的运动能力,因此能够在各种地形上移动。在过去的几十年里,世界各地的机器人专家一直在尝试在四足机器人中有效地重现这些动作。
通过强化学习训练的计算模型在实现四足机器人敏捷运动方面取得了特别有希望的结果。然而,这些模型通常是在模拟环境中训练的,当它们应用于现实环境中的真实机器人时,性能有时会下降。
实现敏捷四足运动的替代方法是利用运动传感器和摄像机收集的动物运动镜头作为演示,用于训练控制器(即执行机器人运动的算法)。这种被称为“模仿学习”的方法能够在某些四足机器人中重现类似动物的动作。
最新资讯
- 1

氢装上阵 共启未来 首批远程氢燃料电池重卡下线远程浏览
- 2
构建创新理论,加速营销转型,福田汽车2024年中商务会 隆重举行浏览
- 1
福田汽车加速混动进程 构筑商用车发展新格局
- 2
产品竞争力显著提升 助力汉马科技上半年增幅超大盘
- 3
比克全极耳圆柱电池8C放电,为eVTOL新赛道提供可靠动力
- 4
新智启新质 蓄势创新局 远程与采埃孚达成战略合作
- 5
会展动态丨TMC2024——商用车动力系统论坛剧透一:国内外商用车电驱桥技术创新集粹
- 6
会展动态丨TMC2024电驱动系统专题剧透:多方位深层次创新,挑战物理极限
- 7
超级皮卡 超级路亚 雷达汽车杯超级路亚中国巡回赛走进江苏
- 8
行业首次“180天只换不修” 京东618新能源充电桩送装一体 实惠再升级
推荐资讯
网友跟帖
- 1
-
热门文章











Copyright 2010-2023 http://www.trendz.com.cn 电动新能源车网 版权所有
任何单位或个人认为本站的内容可能涉嫌侵犯其合法权益,应及时向本站反馈,并提供相关权属证明及详细侵权情况说明,本站将会立即移除被控侵权内容。