

-
宾夕法尼亚大学开发新算法 帮助机器人掌握物理接触技能
时间:2024-10-23来源:电动新能源车网作者:热度:
据外媒报道,宾夕法尼亚大学的工程师们开发出新算法,可以让机器人对复杂的物理接触做出实时反应,从而使自主机器人能够完成以前不可能完成的任务,比如控制滑动物体的运动。
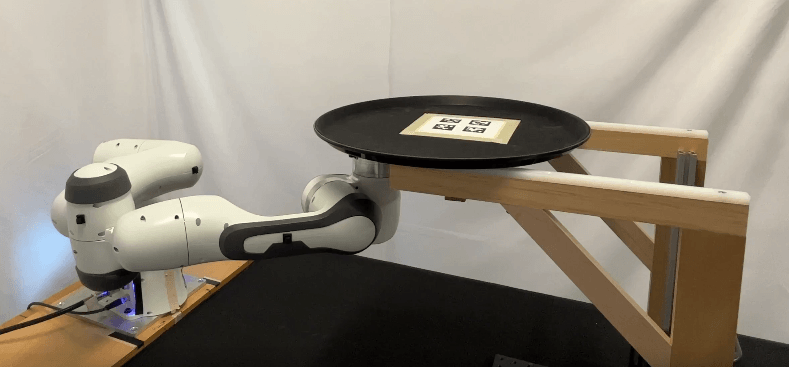
(图片来源:宾夕法尼亚大学)
该算法被称为共识互补控制(C3),可能成为未来机器人的重要组成部分,将大型语言模型(LLM)等人工智能工具输出的指令转化为适当的行动。机械工程和应用力学(MEAM)助理教授Michael Posa表示:“大型语言模型可能会说‘去切个洋葱’。这应该如何移动手臂来抓住洋葱,拿着刀以正确的方式切开它,必要时重新调整它的方向呢?”
机器人面临最大的挑战之一是控制,这个术语指的是机器人执行器的智能使用,而执行器是机器人移动或控制四肢的部件,比如电机或液压系统。控制机器人与其周围环境的物理接触既困难又必不可少。Posa表示:“这种低级和中级推理是让各种事物在物理世界中发挥作用的基础。”
最新资讯
- 1

艺康水管理智慧引领低碳革新,助力汽车行业减碳增效筑绿色产业链浏览
- 2
引领标准革新,筑就产业高地 2024年易派客工业品展览会国家技术标准创新基地展团打造标准强引擎浏览
- 1
展会面积8万平方米,600多家重要工业领军企业参展 第三届易派客工业品展览会在南京举办
- 2
阳光电源ESG评级达全球领先水平,获MSCI AA级认证
- 3
绿色出行 动力未来
- 4
销冠车型再添猛将,鑫源T5LEV城际版首发仪式圆满成功
- 5
纯电皮卡技术独树一帜,吉利雷达亮相台州车展吉利专馆备受关注
- 6
五星直营体验中心启幕,宁家服务推动新能源后市场生态建设
- 7
史上最严电池报废新规来了,电池回收开启“淘汰赛”
- 8
潮动蓉城 共赴热爱 魏牌全新蓝山成都车展圈粉无数
推荐资讯
网友跟帖
- 1
-
热门文章










Copyright 2010-2023 http://www.trendz.com.cn 电动新能源车网 版权所有
任何单位或个人认为本站的内容可能涉嫌侵犯其合法权益,应及时向本站反馈,并提供相关权属证明及详细侵权情况说明,本站将会立即移除被控侵权内容。